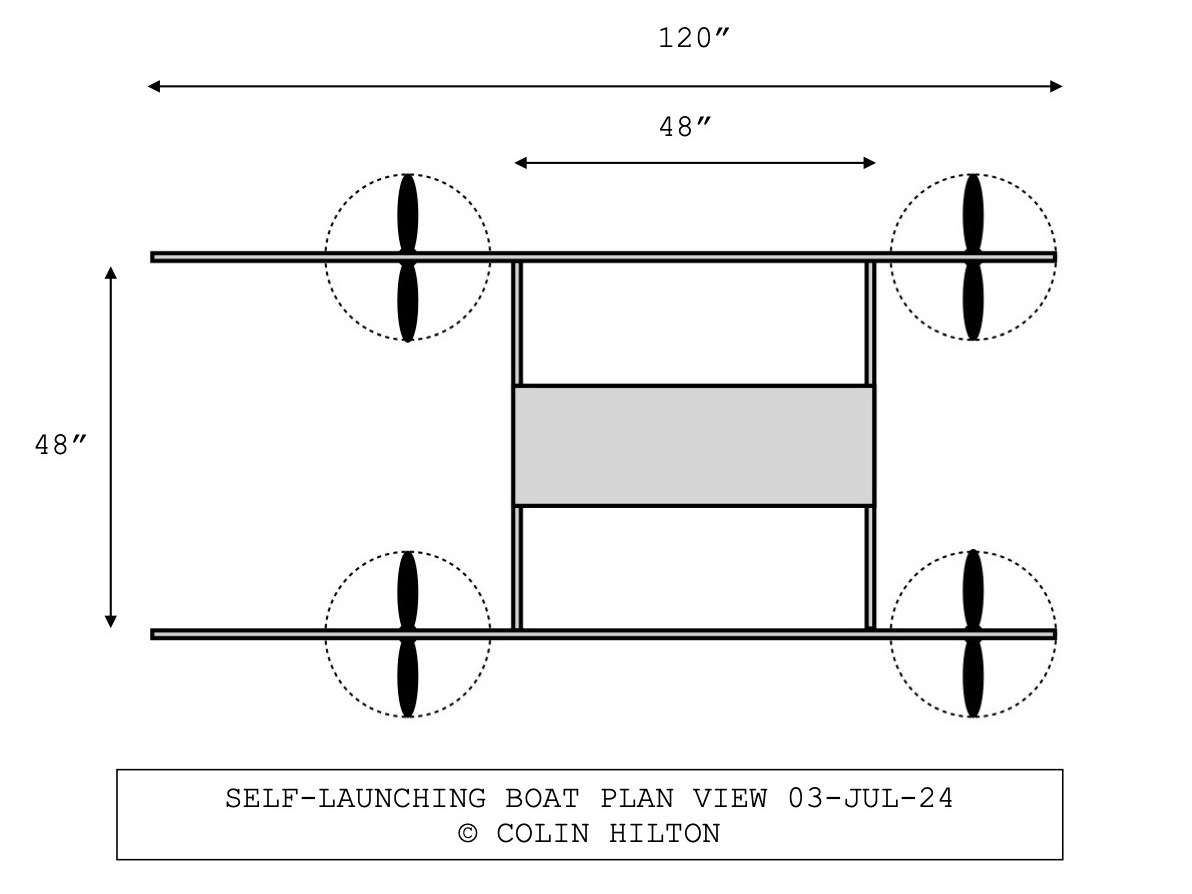
I've reduced the beam to around one metre, which am happy with because material like carbon fibre spars tend to be cheapest to source around that measure. I think it looks better too, with a length to width ratio of 3:1, beside the fact the structure is strengthened by the reduction.
Nonetheless the thorny question of where to locate the motors rears its ugly head in a decidedly mixed metaphor, and either way it is looking like six at this stage instead of four.
In the developing world of flying taxis there are three principal modes of flight:
(a) A multicopter with four or more horizontal propellers.
(b) A set of horizontal propellers and a perpendicular propeller for forward flight.
(c) A mix of fixed horizontal propellers beside vectoring propellers for forward flight.
(a) is out of the question for boats, because it requires a significant forward tilt when it transitions to forward flight, and that is the last thing you'd want in a fast-moving boat. It is also decidedly inefficient.
(b) has much to commend it. because it is as simple as it gets and was in fact among the first solutions for eVTOL aircraft.
(c) is the 'smart' solution, used by the likes of Archer and Joby among others, although vectoring mechanisms add weight and complexity.
I would like the 'lift' motors purely to add lift in the absence of a controller, but there are two problems associated with a simple lift arrangement like the hovercraft in the absence of separate controls for lateral motion.
For In the sci-fi 1960s era they thought we'd all be driving to work in a hovercraft if not a flying car, but the problems when they tried it were that weights like a suitcase set apart from the centre of gravity meant that the craft would float in that direction once airborne. Another issue was that for similar reasons, the thing would slide off the camber of the road into the kerb from the get-go.
Accordingly if you've four or motors raising say a boat into the hover, then it needs a flight control computer to adjust the thrust of each motor to balance these adverse forces out.
At this stage we can run with six motors (as seen down the starboard pontoon), with the rear-most helping out with the heavy lifting and vectoring once in water through ninety degrees to provide the forward motion.
Or we can adopt the arrangement seen on the port pontoon, where four motors are fixed to the float for hovering and a further motor is fixed to the rear to push it along once waterborne.
The first arrangement looks elegant and provides all six motors for launching the boat into the water, but from experience building super-sized drones, has problems written all over it.
The second, although an ugly duckling in comparison, is a fairly bog-standard solution. It also has the benefit at a larger scale ~ with me sitting on it in prospect ~ that all of the electrical components would be within reach without falling into the water,
At this stage of development the aim has to be to inspire, as Benz with the car and the Wright brothers the plane.
It's a boat... It's a plane... It's Superman!
Yes, I come with it too.