Up there with questions like 'How does a wing produce lift?' an endless debate is the issue of whether or not pendulous stability actually exists in flight, at least beyond hanging from a balloon in a basket is concerned. Tom Stanton's excellent video would suggest that it's a mythical beast, whilst aircraft that are supposed to be extra stable in view of an overhead wing or rotor appear to be anything but to pilots.
The controversy is complicated by the interaction of forces attributable to drag and an interplay of all forces in a realm of aerodynamics. In an effort to grasp the essentials however I prefer to defer to real-world experience, and people who know a great deal about drones tell me that flying with a suspended load ~ whether tethered or fixed ~ is increasingly challenging when that load becomes further removed.
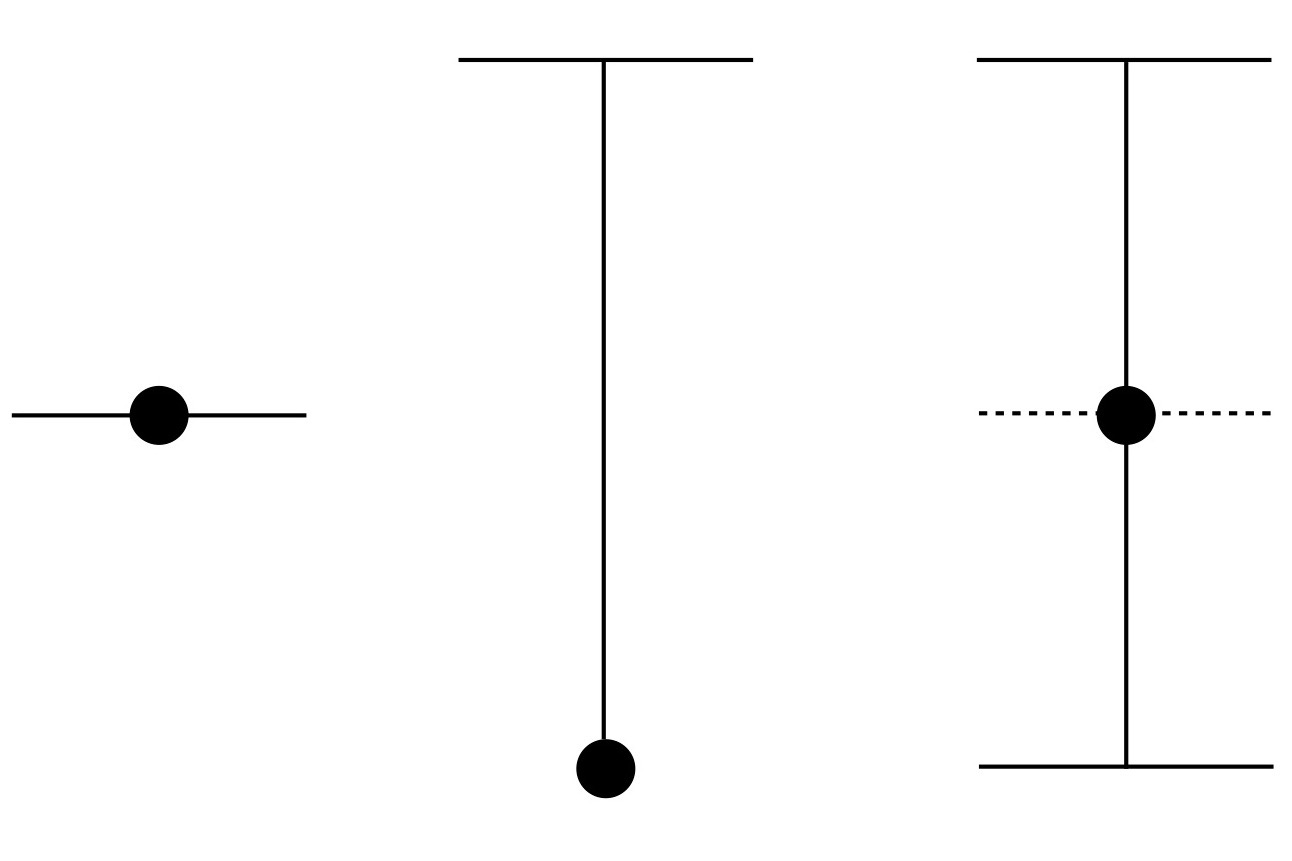
The issue is inherently inertial and could be considered in the absence of flight, as on the ground or suspended in space. The first diagram shows how all successful drone manufacturers start out in designing an airframe, not least because it is the easiest to produce in moulded plastic. Forces applied near the end of either cantilever have only to rotate the central mass to vector thrust, so there is clearly not a good deal of extra energy required. An example is moving boxes around a warehouse floor, best done by shouldering the load in line with its centre of gravity.
Further removing the centre of gravity, as in the second diagram, complicates matters considerably and matters not whether a drone is arranged with mass far above or far below. Take for instance balancing a pencil on a finger or telegraph pole in both arms. Whilst vertical, the force due gravity passes through the support, but falling produces a vector that also acts in the direction of lean.
Now that can be compensated for in the event whoever balances pencil or pole runs sufficiently fast as to counterbalance the additional vector. Clearly though a good deal of energy is required, and this is as true for the drone as for you or I. What it means in turn is the drone loses its ability to manoeuvre, because it requires a certain level of thrust to stay airborne, and a large margin of extra thrust in order to change direction.
Looking at the disposition of load and thrust in the second diagram it is clear that the drone has less purchase in altering the position of the mass; furthermore it is inclined to rotate around that mass like Earth orbiting the Sun. The only way of preventing this is again to add thrust and we don't know from Tom Stanton's experiment how much, because he doesn't measure it... take YouTube videos with a pinch of salt.
All of this suggests overhead or underslung rotors reduce baseline manoeuvrability, in one case because a larger moment arm is necessary (evidenced by the diameter of a helicopter main-rotor) or in the other because excess thrust is always going to be needed to correct departures from level flight. This suggests that helicopter look-alike such as Volocopter or Hexa will not set the world alight compared to air vehicles like Jetson or Airspeeder, which centre their mass.
The third diagram is why I concluded that if the TELEDRONE is to have eight rotors for redundancy (and to keep it compact), they are ideally distributed vertically as well as horizontally. All else being equal, thrust applied to the cantilevers seen in the diagram should act around a mid-point. This is about where the vehicle (and our own) centre of gravity is located, thus restoring the available purchase we see in the first diagram.
Whether this works in reality is something that we hope to see prior month's end.